Robotics for extreme environments
The focus of the research is to develop robotic systems that are able to explore and manipulate objects in extreme environments, such as those found in the nuclear industry, power generation or agriculture.
Key researchers
- Barry Lennox (Theme Leader)
- Farshad Arvin
- Joaquin Carrasco
- Peter R. Green
- Alexandru Stancu
- Simon Watson
Working with The University of Manchester's Dalton Nuclear Institute we have research teams based in both west Cumbria, at the Dalton Cumbrian Facility, and in Manchester, where we work directly with major organisations in the nuclear and power industries, such as Sellafield Ltd, the National Nuclear Laboratory, GE Grid and National Grid.
Our research includes novel platform design, communications and localisation, sensing and navigation and multi-level control.
Key research topics
Decommissioning robotics
Latro is a robotic spider that can be used in the monitoring and decommissioning of both dry and wet nuclear storage facilities. The robot is designed to cut, sort and retrieve material from storage facilities.
Representative projects of the UoM Robotics are found on the UoM Robotics YouTube channel.
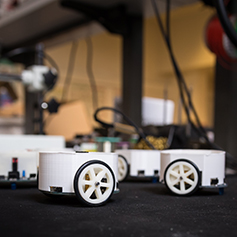
Ground based robotics
MIRRAX is a mobile robot platform for deployment at the Sellafield site. Its reconfigurable shape allows it to enter facilities through a 150mm access port, where it can climb steps, move over rough terrain and provide a geometrical and radiological map of a radioactive environment.
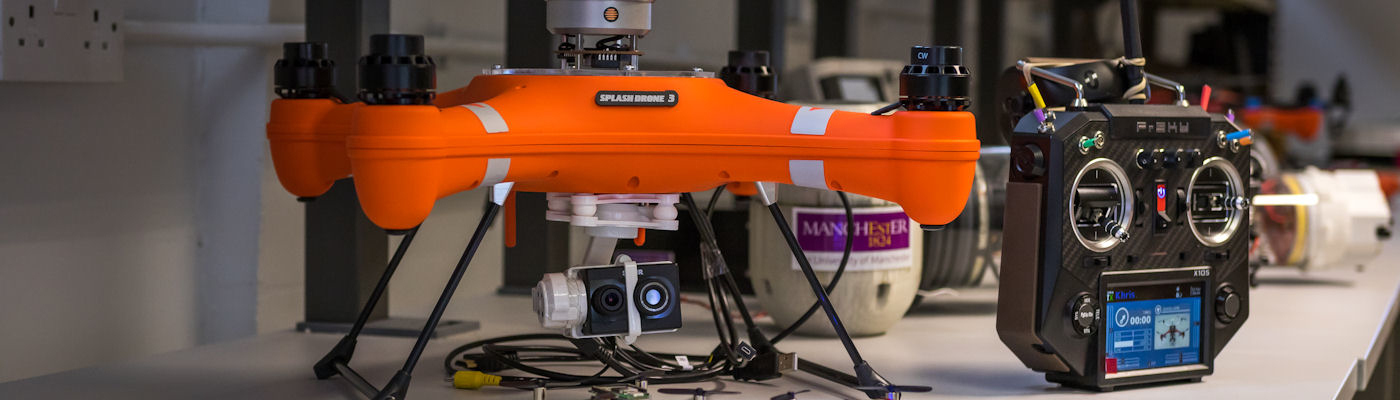
Submersible robotics
The AVEXIS vehicle has been designed to explore the legacy nuclear storage ponds at the Sellafield site. Work is ongoing to develop a robot to explore the reactors at the Fukushima Daiichi Nuclear Power Plant.
Laboratories
The Robotics for Extreme Environments research theme is supported by three labs; two based on the Manchester Campus and one based in West Cumbria. The two labs in Manchester support research in robots for nuclear and offshore energy-based environments, while the West Cumbria Robotics for Extreme Environments Lab (REEL) is supported by the Dalton Cumbrian Facility, contributing to its nuclear engineering decommissioning research programme.
The Manchester labs have test facilities for ground (wheeled and legged) and aerial robots including a reconfigurable testing arena and flight cage with tracking systems for external validation. REELs facilities include a large warehouse space which affords an ideal area for creating larger scale variable test scenarios for ground-based and aerial robots, in addition to housing a 12 m3 water tank for aquatic robot testing scenarios.
Programme leaders
Our Department leads the following two EPSRC programmes:
- Robotics for Nuclear Environments Programme Grant.
Areas of interest
-

Autonomous systems
We develop innovative scientific methods that lead to technologies requiring minimal human intervention.
Read more
-
Communications
We work on multidisciplinary approaches to problems in highly mobile communications, cognitive radio, RF and more.
Read more
-
Mechatronics
We specialise in electromechanical technologies for renewable energy systems and electric vehicles.
Read more
-
Sensors and sensing systems
Our work includes developing new sensors and designing systems and integration tools.
Read more
-
Systems integration
We work on systems integration across all levels, from low-power applications to high voltage systems.
Read more